- 作品名称:
- 基于谐振驱动原理的微型移动机器人
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
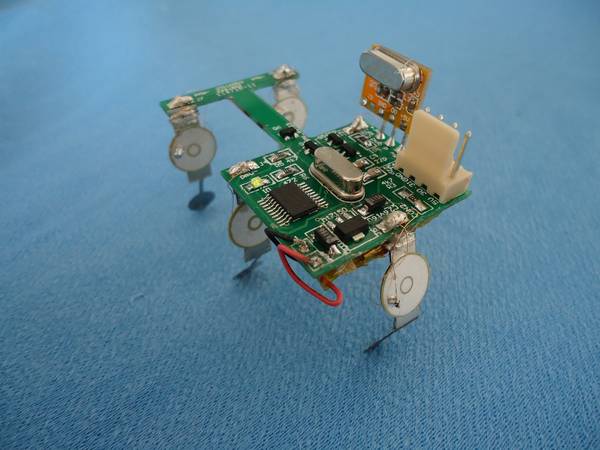
- 针对现有的机器人结构复杂、体积大、成本高,不利于在特定环境下工作等问题,提出一种基于谐振驱动原理的微型移动机器人。具有控制灵活、速度快、功耗低、便于批量制造等优点。本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。
- 详细介绍:
- 本项目设计了一类基于谐振驱动原理的微型移动机器人,可以作为通用移动平台搭载作业装置或微型传感器,单机或多机组网作业。项目的具体研究思路是针对现有微小型机器人在研究中遇到的问题提出了一种新型谐振式驱动方式,利用Ansys建立柔性足子结构的有限元模型,进行模态分析,设计双压电膜的结构尺寸,进行微型机器人能源模块、主控模块、驱动模块、无线通信模块的系统集成与小型化设计,将整个移动机构简化为一个构件,实现致动、传动、执行元件的一体化,使其结构简单,易于小型化和批量制造。基于该研究思想研制地面、管道微型移动机器人样机。研制的微型机器人具有控制灵活、速度快、功耗低、便于批量制造等优点,可用于检测有毒气体、放射性物质,工业中细小管道的情况,或作为侦察设施用于城市巷战中的情报搜集等。如制做的管道机器人样机尺寸20mm*11mm*12mm、可适应的管径最小为15mm、质量9.039g、最大速度接近30mm/s。它可携带检测传感器广泛应用于石油、化工以及核电站中细小管道的内窥检测,生产、安装过程中的管内外质量检测,管道使用过程中焊缝情况、表面腐蚀、裂缝破损等故障诊断,以及对埋地旧管道的检查等。
- 获奖情况:
- 1、一种微型管道移动机器人,申请国家发明专利,专利号:201110086875.4,第一发明人为项目主持人。(见附件二)
2、基于单片机无线控制的新型谐振式微型移动机器人,已被《2010年IEEE光学仪器与测量》录用,并于2010年11月刊登,第一作者为项目主持人。(见附件三)
3、中广核检测技术有限公司、苏州博实机器人技术有限公司对本项目研制的地面微型移动机器人和微型管道内窥检测机器人进行测试,评价较高。项目作品曾被扬子晚报、苏州日报、科学时报、江苏科技报等多家媒体报道。(见附件四、五、六、七) 4、我校第十一届“挑战杯”科迪石化大学生课外学术科技作品竞赛特等奖。(见附件八)
5、我校第十二批大学生课外学术科研基金资助项目,重大项目,项目编号KY2010002Z。(见附件九)